10. [Micropython]TPYBoard v10x 智能蓝牙+红外循迹小车¶
原创版权归山东萝卜科技有限公司所有,转载必须以链接形式注明作者和原始出处。
10.1. 实验目的¶
- 学习在PC机系统中扩展简单I/O 接口的方法。
- 进一步学习编制数据输出程序的设计方法。
- 学习蓝牙模块的接线方法及其工作原理。
- 学习 L298N电机驱动板模块的接线方法。
- 学习蓝牙控制小车的工作原理。
10.2. 所需元器件¶
- TPYBoard v102板子 1块
- 蓝牙串口透传模块(HC-06) 1个
- L298N电机驱动板模块 1个
- 智能小车底盘 1个
- 数据线 1条
- 杜邦线 若干
- 智能蓝牙小车APP(Android版) 点击下载
10.3. 蓝牙串口模块原理¶

(1)引出接口包括EN,5V,GND,TX,RX,STATE,我们小车只用到RX,TX,GND,5V四个针脚
(2)模块默认波特率位9600,默认配对密码为1234,默认名称位为HC-06
(3)led指示蓝牙连接状态,闪烁表示没有蓝牙连接,常亮表示蓝牙已连接并打开了端口,当我们用安卓手机软件发送指令时,通过串口给TPYBoard发送指令,TPYBoard收到指令通过L298BN模块来驱动小车前进,后退,向左,向右或者停止。
如下表接线:
蓝牙模块(HC-06) TPYBoardv10x 5V VIN(+5V) GND GND RX Y9(UART(3)-TX) TX Y10(UART(3)-RX)
10.4. 四路红外循迹模块¶
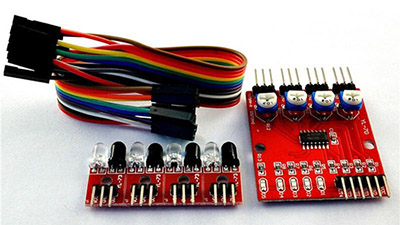
(1)当模块检测到前方障碍物信号时,电路板上红色指示灯点亮,同时OUT端口持续输出低电平信号,该模块检测距离2~60cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
(2)传感器属于红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
(3)传感器模块输出端口OUT可直接与单片机IO口连接即可, 也可以直接驱动一个5V继电器模块或者蜂鸣器模块;连接方式: VCC-VCC、GND-GND、OUT-IO。
(4)比较器采用LM339,工作稳定。
(5)可采用3.3V-5V直流电源对模块进行供电。当电源接通时, 绿色电源指示灯点亮。
10.4.1. 四路红外感应探头的安装¶
寻迹的原理其实就光的吸收,反射和散射。大家都知道,白色反射所有颜色的光,而黑色吸收所有颜色的光,这就为小车寻迹提供了有力的科学依据。在小车的车头上安装上红外探头(我是安装了四个),一字顺序排开。哪个探头接收不到反射或者散射回来的光时,说明这个探头此时正在黑色的寻迹带上。
10.4.2. 判断反馈的信号¶
如果要是正前方的探头接收不到光,那么说明小车此时走在黑色的寻迹带上。可以使小车直线行走。如果左面的探头接收不到光,那么说明小车左面出现了黑色寻迹带,此时小车应该执行左转弯。右转弯同左转弯原理。 如果要是小车前面,左面,右面三个方向全都接收不到光,或者是两个方向上的探头都接收不到光,到底是左转弯,右转弯还是继续直行,这个就要看你自己在程序里怎么做判断了。
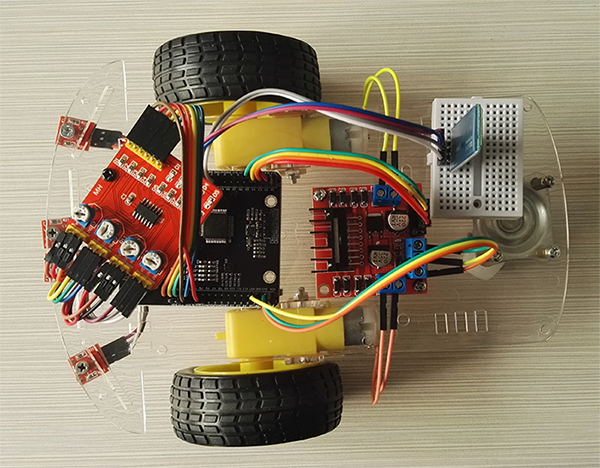
10.4.3. 探头的安装与接线¶
四路红外探头接线很简单,虽然有十八根线,但是有十二根是三根三根的分成四组,一一对应接线,其余的六根,是VCC和GND。还有四根是接到TPYBoard v10x开发板的IO口上的,用于接收四路红外循迹模块反馈的信号。
接线OK后,编写main.py,给TPYBoard通电就ok了,下面是源代码。
10.5. 源代码¶
# main.py -- put your code here!
import pyb
from pyb import UART
from pyb import Pin
N1 = Pin('X1', Pin.OUT_PP)
N2 = Pin('X2', Pin.OUT_PP)
N3 = Pin('X3', Pin.OUT_PP)
N4 = Pin('X4', Pin.OUT_PP)
M1 = Pin('Y1', Pin.IN)
M2 = Pin('Y2', Pin.IN)
M3 = Pin('Y3', Pin.IN)
M4 = Pin('Y4', Pin.IN)
blue=UART(3,9600)
mode='1'#1:表示蓝牙模式 2:循迹模式
def Stop():
N1.low()
N2.low()
N3.low()
N4.low()
def Back():
N1.high()
N2.low()
N3.high()
N4.low()
def Go():
N1.low()
N2.high()
N3.low()
N4.high()
def Left():
N1.high()
N2.low()
N3.low()
N4.high()
def Right():
N1.low()
N2.high()
N3.high()
N4.low()
while True:
if blue.any()>0:
data=blue.read().decode()
print(data)
if data.find('0')>-1:
#stop
Stop()
mode="1"
print('stop')
if data.find('1')>-1:
Go()
print('go')
if data.find('2')>-1:
Back()
pyb.delay(500)
Stop()
if data.find('3')>-1:
Left()
pyb.delay(250)
Stop()
if data.find('4')>-1:
Right()
pyb.delay(250)
Stop()
if data.find('5')>-1:
mode="1"
Stop()
if data.find('6')>-1:
mode="2"
else:
if mode=="2":
print('循迹模式')
if(M1.value() and M2.value() and M3.value()):
Stop()
mode="1"
if(M2.value() or M3.value()):
pyb.LED(2).on()
pyb.LED(3).off()
pyb.LED(4).off()
Go()
if M1.value():
pyb.LED(3).on()
pyb.LED(2).off()
pyb.LED(4).off()
Right()
pyb.delay(10)
if M4.value():
pyb.LED(4).on()
pyb.LED(2).off()
pyb.LED(3).off()
Left()
pyb.delay(10)
10.6. 智能蓝牙小车APP的使用¶
下载安装后,打开[蓝牙智能小车]APP,进入操作界面。如下:

点击左下角的桃心图标,进入自定义编码界面。通过这个界面,我们可以自定义操作界面中各个按键发出去的指令内容。如下:

点击页面下方的关于我们,可以加入我们的技术交流群和关注微信公众号。如下:

接下来,回到一开始的操作界面,点击右下角的设置图标,进行蓝牙模块的连接。首先先点击[搜索蓝牙设备],界面会自动加载搜索到的蓝牙设备,当出现HC-06时,点击进行连接。

如果是第一次连接,需要进行配对,配对的密码默认1234。
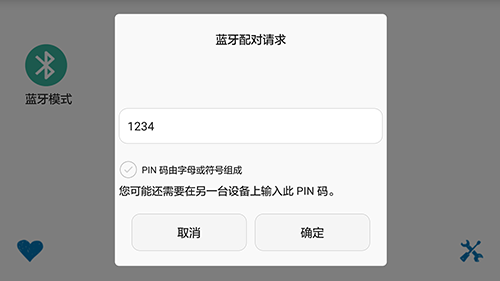
提示连接成功后,我们就可以通过四个方向键来操纵智能蓝牙小车了。
大家可以看到,右上角的图标,可以进行蓝牙模式和循迹模式的切换。当按下时,两种模式来回切换。当处于循迹模式时,界面如下。